
Tangan robot ini menggunakan niat Anda untuk berfungsi dari jarak jauh
Berita Terkait
Orang yang diamputasi memiliki lebih banyak kesulitan dalam hari mereka daripada yang dapat kita pikirkan. Cukup mengambil sesuatu dengan prostesis tangan atau berjalan dengan prostesis kaki bisa menjadi tantangan. Itulah sebabnya teknologi berusaha meningkatkan sebanyak mungkin kualitas hidup orang-orang ini, dan Tangan robot ini adalah contoh nyata dari hal ini.
Tangan robot yang akan kita bicarakan telah dikembangkan oleh Federal Polytechnic School of Lausanne (Swiss), dan bertujuan untuk menjadi revolusi di bidang tersebut. Karena kita berbicara tentang tangan robot yang tidak hanya menanggapi niat pengguna, Itu jarak jauh.
Kemajuan ini menggunakan aktivitas otot pengguna dan menerjemahkan melalui algoritme niat orang tersebut untuk melakukan tugas yang relevan. Berkat tangan ini, orang yang diamputasi dapat memiliki lebih banyak fasilitas dalam kehidupan mereka.
Tangan robot yang membaca aktivitas otot Anda dan memahami gerakan Anda
Di sisi neuroengineering, tangan yang dimaksud mampu untuk mengenali aktivitas otot di tunggul orang yang diamputasi dan menentukan gerakan yang dimaksud. Dengan kata lain: jika saya ingin menggerakkan jari, tangan robot ini akan menggerakkan jari yang sama berdasarkan aktivitas otot tunggul. Sesuatu yang peneliti katakan Itu belum pernah terjadi sebelumnya.
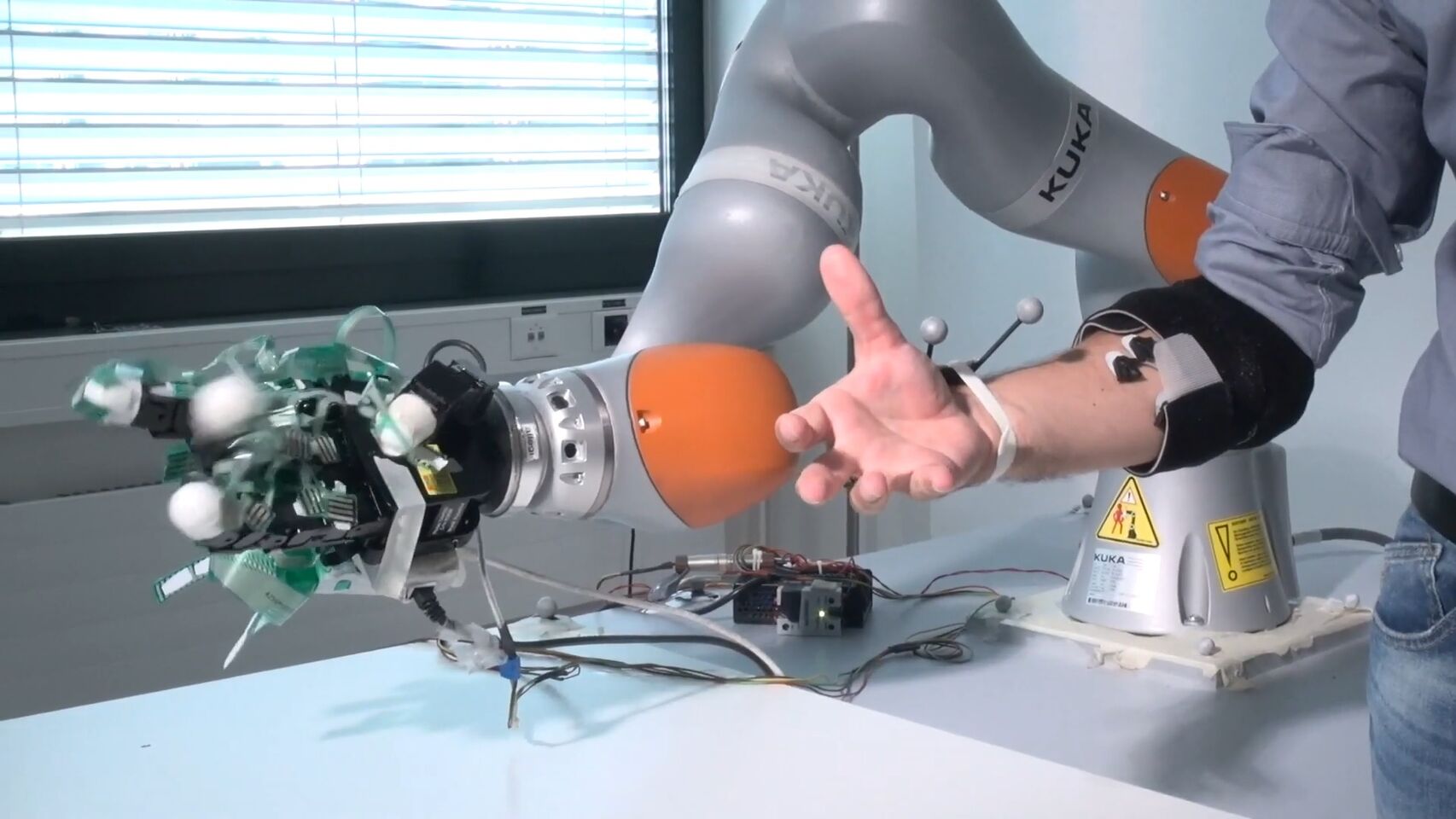
Jika kita fokus pada bagian robot tangan itu dirancang untuk bisa meratakan ambil dan tahan benda untuk melakukan tugas. Manusia, begitu dia mengambil sesuatu dan menyelipkannya, memiliki beberapa milidetik untuk bereaksi. Tangan robot ini bisa bereaksi dalam 400 milidetik berkat sensor tekanannya yang terletak di jari.
Tangan robot.
Selain itu, tim di balik tangan ini telah menggunakan algoritma yang belajar untuk memecahkan kode niat pengguna dan menerjemahkan niat itu menjadi gerakan jari tangan prostetik. Untuk melakukan pelatihan algoritma ini, pengguna harus melakukan serangkaian gerakan spesifik dengan tangan sehingga sensor yang terletak di tunggul merekam gerakan otot.
Setelah algoritma ini menyertakan gerakan, informasi ini dapat digunakan untuk mengontrolnya bahkan dari jarak jauh, dengan sensor yang terletak di tunggul. Otomatisasi robot yang bertanggung jawab atas penguasaan objek bertanggung jawab atas algoritma yang sama.
Tim memastikan masih banyak "tantangan" untuk mematuhi proyek ini sebelum semua teknologi ini dapat diadaptasi dalam tangan palsu komersial standar. Namun, jika tercapai, kita bisa menghadapi kemajuan besar dalam dunia kedokteran, terutama bagi orang-orang yang harus menderita cobaan ini setiap hari.



